The numbers

Current requirement - (measured at 12v power in)
20 mA idle, 30 mA tracking,
200 mA slewing or rewinding main,
640 mA when seeking index position on all motors.Voltage requirement - 10-25 volts input. SkyStopper can be adjusted to vary the voltage to the motors to run efficiently at higher voltages
Actuator precision - (Based on 16 inch feet spacing on the base) 0.373 arc seconds per step lateral 0.11 arc seconds per step vertical Step Motor: 0.20 arc seconds per guide action in right ascension (1/4 step precision) DC Motor: 0.04 arc seconds per guide action in right ascension (1/4 tick precision)
Adjustability - 60 turns at 1.75 mm per turn, north and south. (Adjust all the feet low and level, then turn the apex knob higher, or adjust all the feet high and level, then turn the apex knob lower)
North distance per turn - 14.7 km nominal (about 9 miles per turn)
Tracking time - depends on telescope geometry, typically the maximum available is 90 minutes
Weight - each of the 2 pieces weighs about 16 pounds
Height - adjustable based on customer input, but typically it adds 7 inches to the height of the telescope and can add more if the feet are extended
Max height of wheels - 4 inches. You can install your own wheels on the base depending on the terrain, and you can transport your telescope on top of the skystopper from your garage, for instance
Bubble level precision - 4 arc minutes
Speaker volume - audible 10 feet away
IR range - IR extension receiver can be used
Guide directions - 10 settings for lateral + vertial ratio adjustment - finer adjustment via the numeric keypad on the control. Guide pulses operate on the RA motors by delaying or advancing them by 25 percent of their step duration.
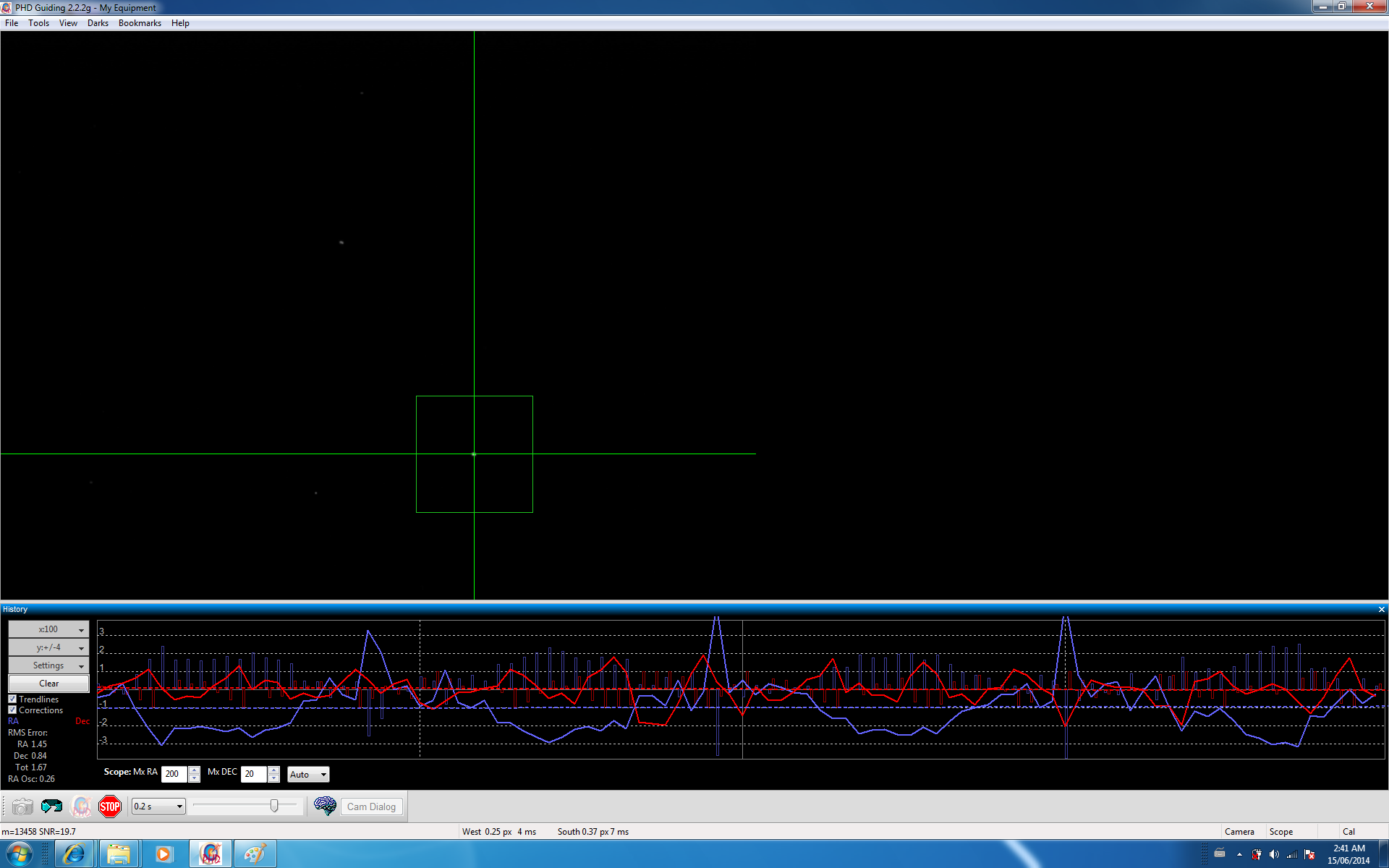
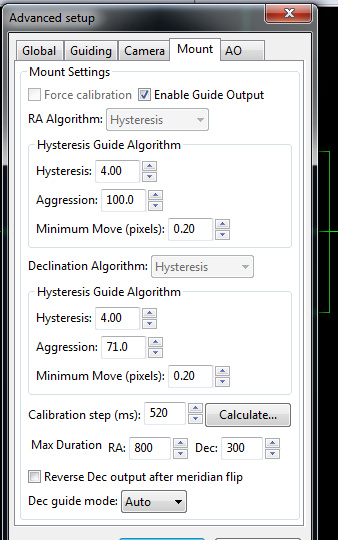
During guiding using PHd Guiding 2, there is less than 2.5 arc seconds rms error . The above graphic shows some of my experimentation with settings. Here's a snapshot of the best settings (seen active near the end of the above graphic.
Display brightness - can be seen if shadowed in daylight. Dimmable by 32x for darkness. Default setting is 2 steps from brightest.
Programmable - JTAG interface is brought to an external connector to make software updates possible (but not easy) with a special cable.
Construction - Stainless steel for all screws, bolts and washers Standard skate bearings are used. Most bearings are easily replaced with just a pair of wrenches.
Surface finish - natural wood. Baltic Birch Plywood uses waterproof glue. The base can be disassembled into a single slab for painting. The bottom could use a coat of paint depending on the terrain and vegetation you plan to use it on.
Capacity - The actuator can lift 100 pounds, and operates on just one of the telescope's 3 legs.
Sound level - Stepper Motor: A quiet ticking sound during operation. The guide actuator is almost silent. Rewind makes a soft hum. Sound level - DC Motor: Almost silent. You have to crouch right down beside it to hear it tracking. The guide actuator is almost silent. Rewind makes a loud whirring sound.
Rewind time - Turbo rewind speed is available, for 60 seconds rewind. Standard is 120 seconds maximum. Rewind to center is quicker.
Commands - 10 commands possible via the pushbutton
Remote control - 32 active keys including guide simulators, actuator individual motor control, and programming options. Undo, show status, adjust parameters